*Not an Actual Spoon
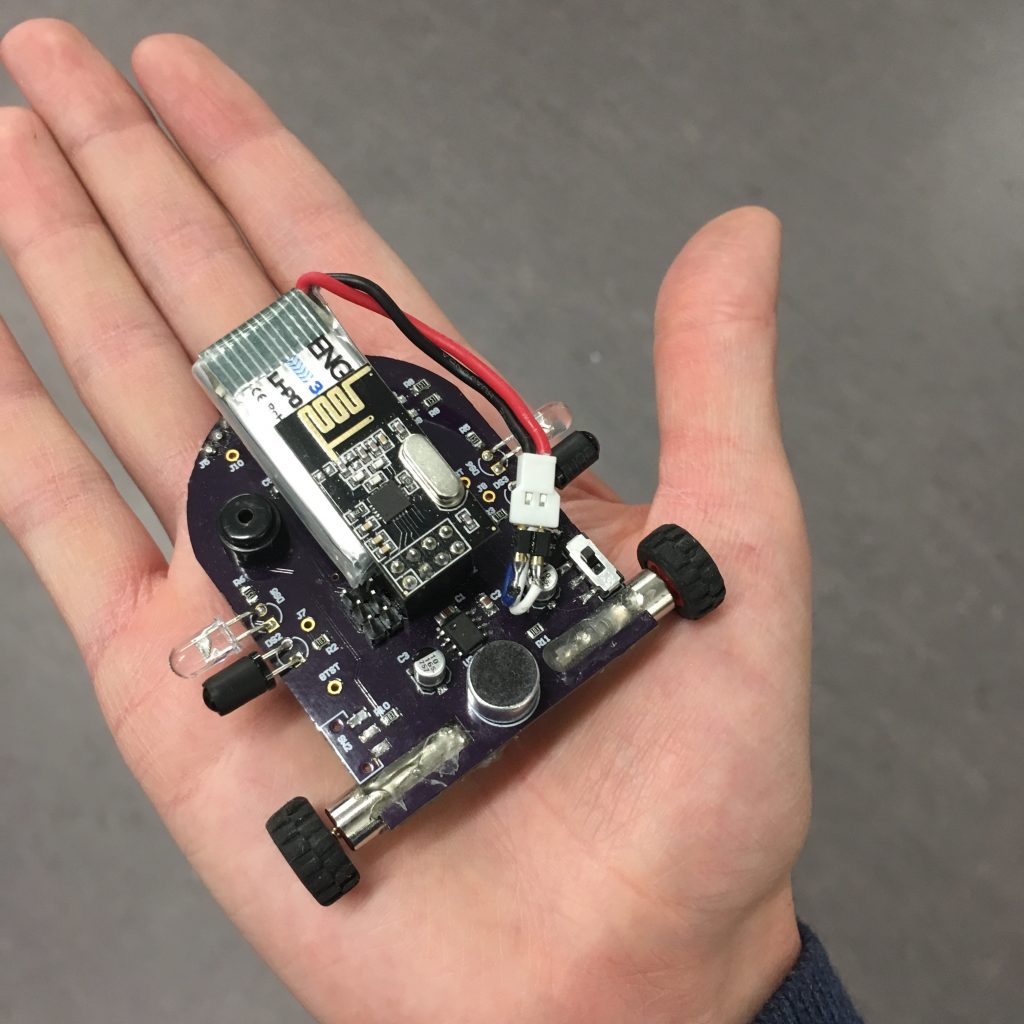
The Legendary Spoon is a miniature robot that can fit in the palm of a hand. It uses small drone motors to drive its wheels (and can therefore go pretty fast). It can do basic obstacle avoidance and line following.
| Start – Completion | October 2018 – December 2018 |
| Languages & Technologies Used | Altium, PCB Design, ATMega328p, L293DD motor driver, LM386, NRF24L01, IR LED/RX, C programming |
Inspiration
My motivation for this project was to design a more complicated PCB than all those that I had designed prior in order to get a bit more practice. The name “Legendary Spoon” was recommended to me by GitHub when I created the repository. I decided I liked the name and kept it.
Development & Challenges
One of the challenges I faced was that when I was using the ADC to measure the voltage of the IR receiver output, I would determine the existence of an object based on a set reading/voltage. However, as the lipo battery powering the robot drained, the distance at which an object was detected would change! A possible fix to this would be to use an external voltage reference that was proportional to supply voltage as the reference for the ADC instead of using the default internal reference.
Shortcomings
The robot wasn’t very robust because the motors kept falling off, future designs should ideally have a better mount (than hot glue) for motors.