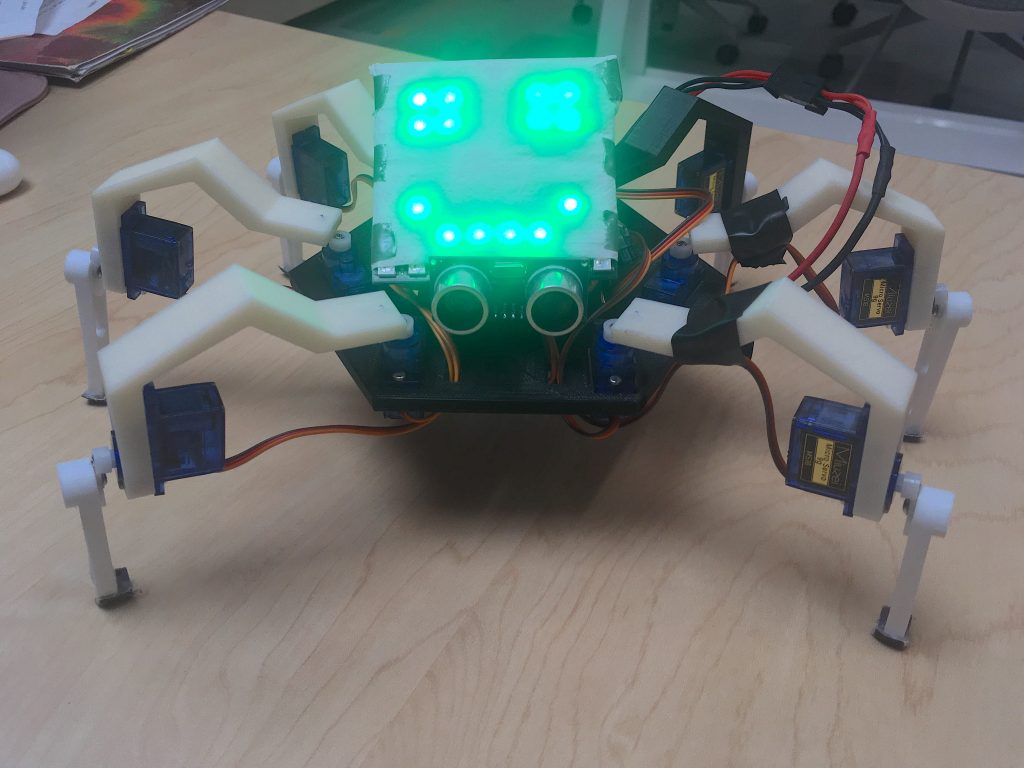
Created as a final project for a microcontrollers class, this hexapod robot will always be there for you.
| Start – Completion | October 2019-December 2019 |
| Languages & Technologies Used | PIC32 uC, C, PCB Design with Altium, device drivers, proto-threads, DMA, PWM, PWM generated using DMA, ultra-sonic sensors, neo-pixels |