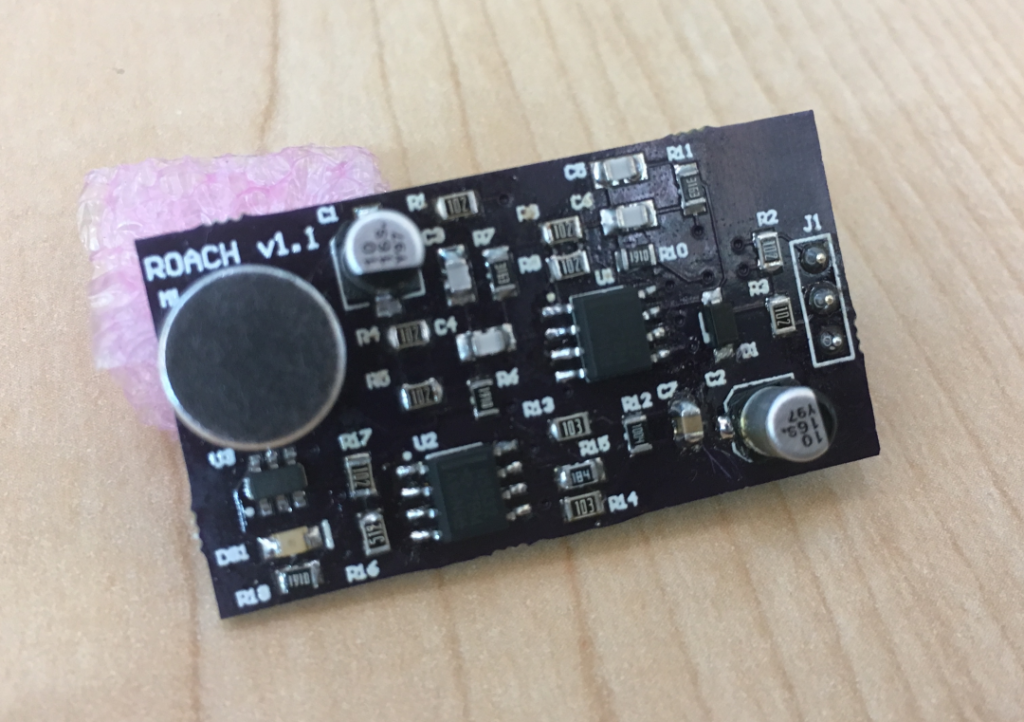
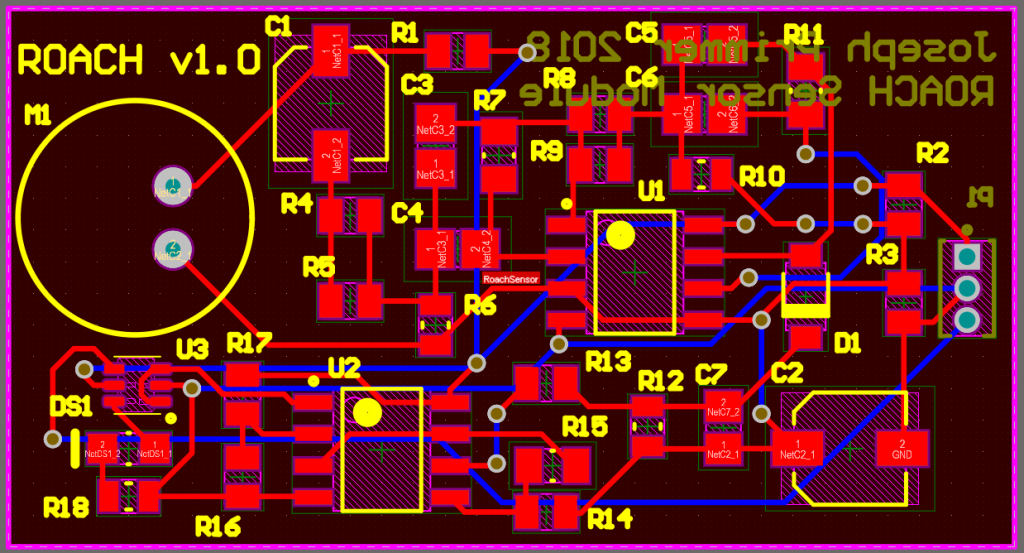
Radio On/off Audio Controlled Homer
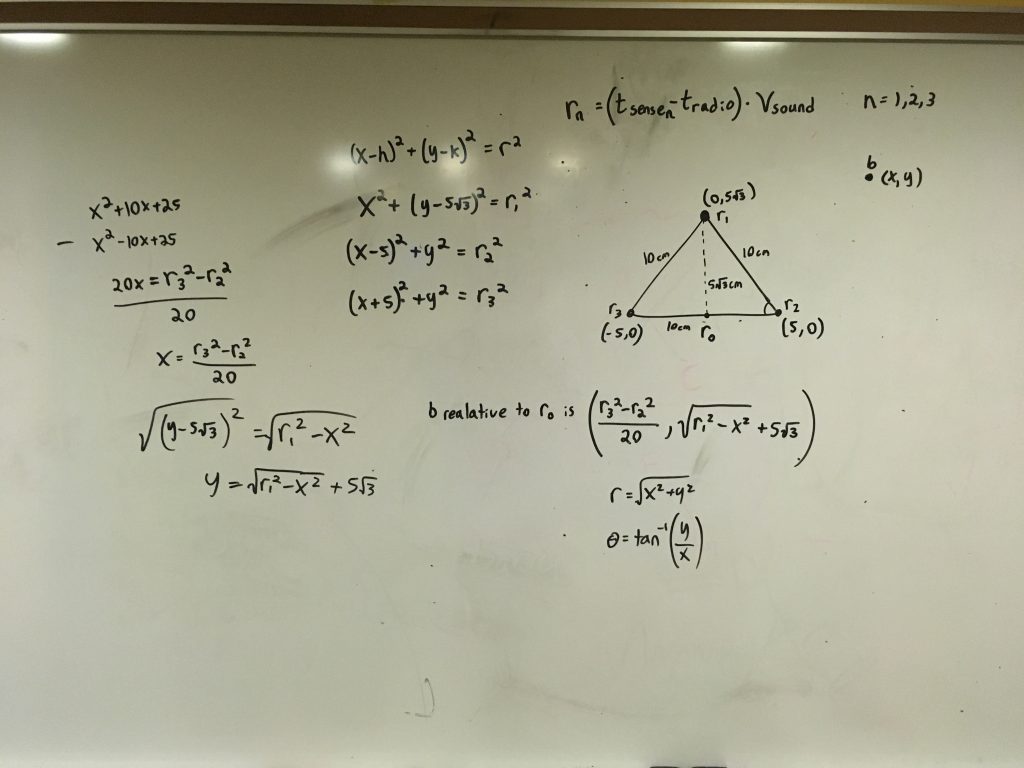
When complete, a robot with an array of ROACH sensors will be able to follow around and track a user that wears an ultrasonic beacon. It would do this by figuring out the distance from the beacon to the microphone for each sensor in the array and trilaterating the relative position of the beacon with respect to the array.
| Start – Completion | July 2017-Ongoing (shelved for now) |
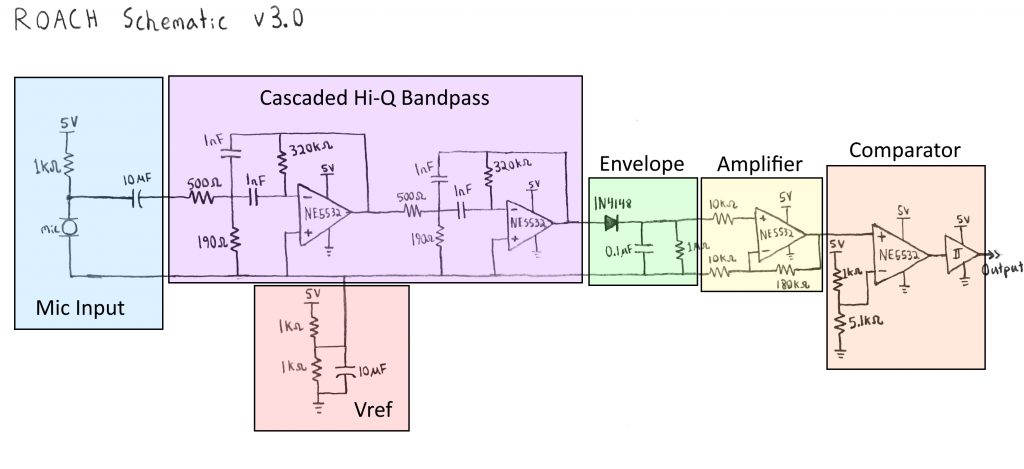
| Languages & Technologies Used | Analog Filters, Hi-Q bandpass, Microphone, Piezo Elements |
Inspiration
My parents have long joked I would someday have some armada of robots following me around. I thought the idea of robots following me around sounded kind of cool, hence this project!
Development & Challenges
I worked on ROACH during the spring of 2018 as I was learning the material I needed to design roach in a class I was taking. I documented my development process on hackaday.
Shortcomings
It’s not finished yet (i.e. it doesn’t quite work yet)