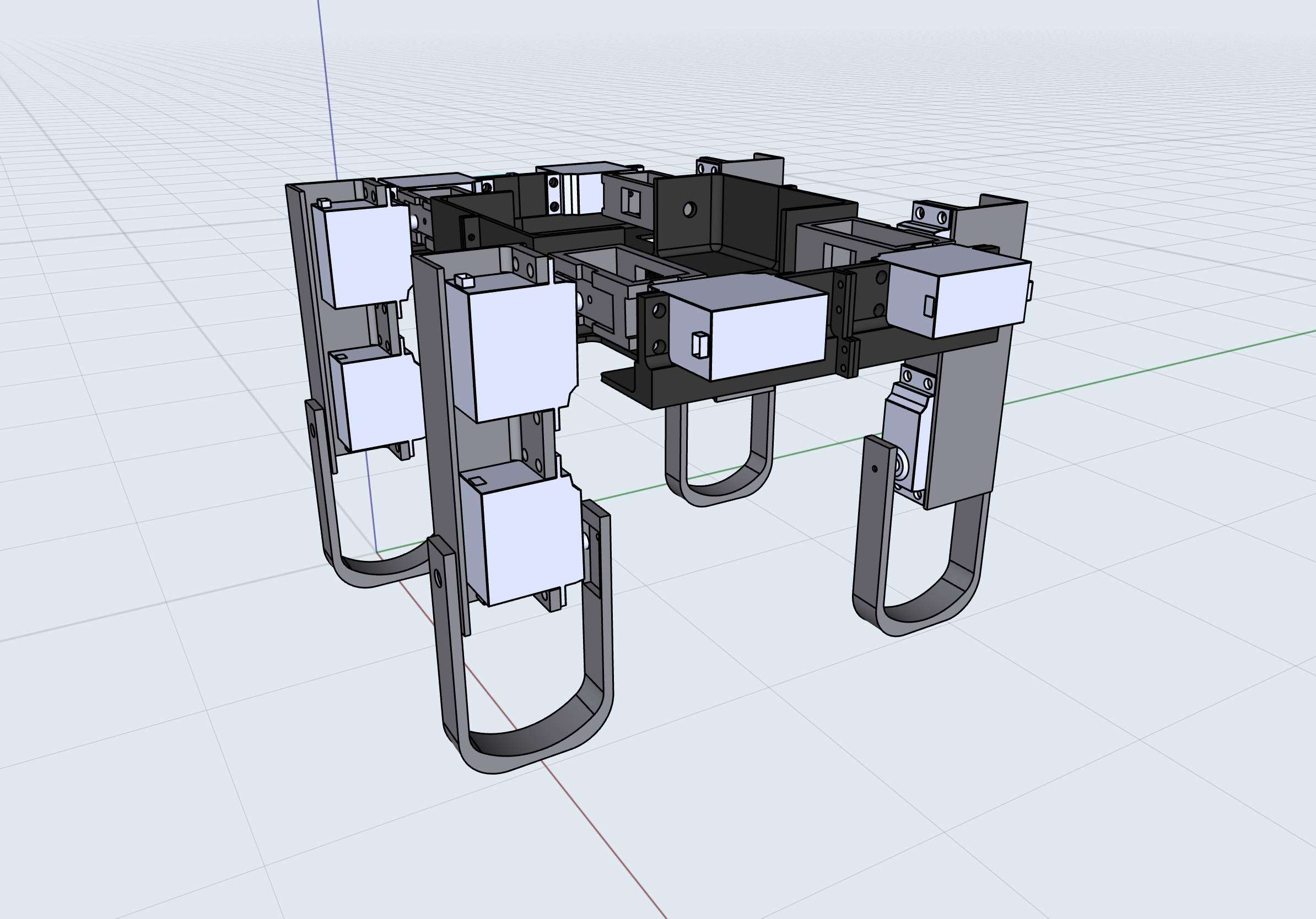
This is a robot dog that started as a side project but then ended up being used as a final project for an embedded OS class. It could wander around autonomously, but could also be remote controlled over the web. It was very challenging to design and to get the walking algorithm just right.
| Start – Completion | July 2020 – May 2021 |
| Languages & Technologies Used | Nvidia Jetson Nano, Raspberry Pi, Python, 3D Printing, 3D CAD/Design, Servos, PWM, Networking Infra |