When lightning strikes the ground we hear the lightning first, followed by the thunder. Using the difference in time, we can calculate the distance.
This served as the inspiration for a project I started three and a half years ago as a freshman in college, called “Radio on/off audio controlled homer”. This project got shelved, but I am now going to continue work from a different angle. Back then I attempted to use analog methods to create a sensor to suit my needs. Now I will go a more digital route that will utilize digital filters implemented on an FPGA. This will lend itself to more rapid development and easier troubleshooting.
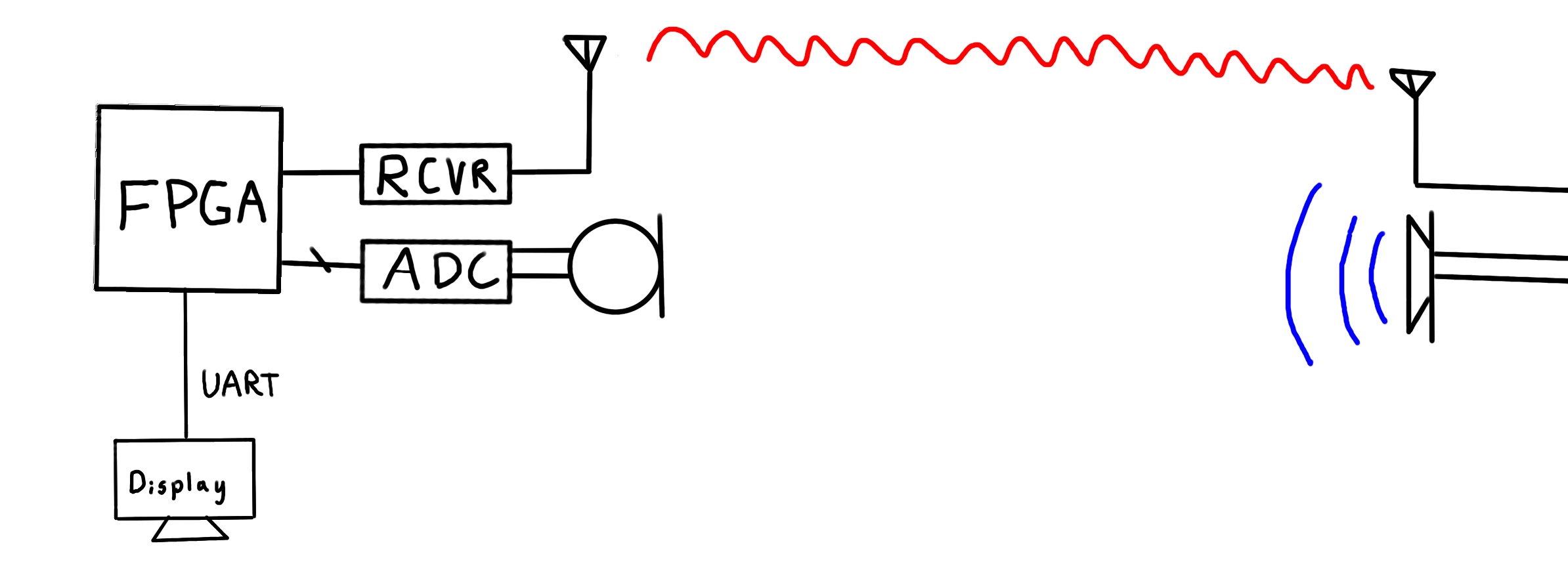
This is a rough schematic of what this very rough prototype looks like. I have a 433 MHz transmitter and speaker set up to send out a radio/sound pulse. On the receiving end, I have an FPGA hooked up to a 433MHz receiver and a mic hooked up to an ADC. The FPGA times the difference in arrival times and sends this information over UART so it can be displayed on a terminal.
//TODO:
- Add more mics to allow calculating relative position of the receiver with respect to the transmitter
- 3D print a structure to hold all of this together
- Design FIR filters within FPGA software to select for transmitted sound frequencies
- Figure out the best way to compare arrival times (threshold + timers or cross-correlation)
- Write an algorithm to use the difference in arrival time to calculate the relative position