In this post, I improve upon the data-path from the last post, design a control path, and write some Verilog to synthesize these designs for an FPGA.
Data Path
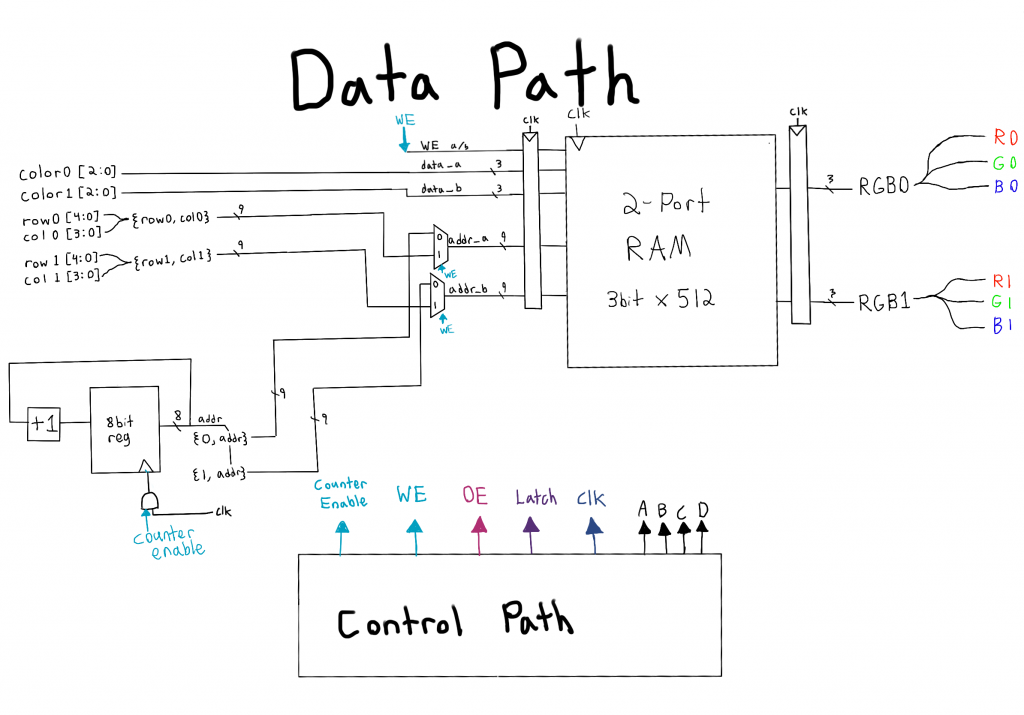
This new data-path includes a more realistic model of what the on-chip RAM of the FPGA will look like. I will be utilizing an Altera (Intel) Cyclone FPGA, and the RAM will be pipelined and have 2 ports that share the read and write functionality. Since the 2 ports are shared for reading and writing a pair of multiplexers chooses between read and write addresses based on the value of the write enable signal (WE).
More Hardware
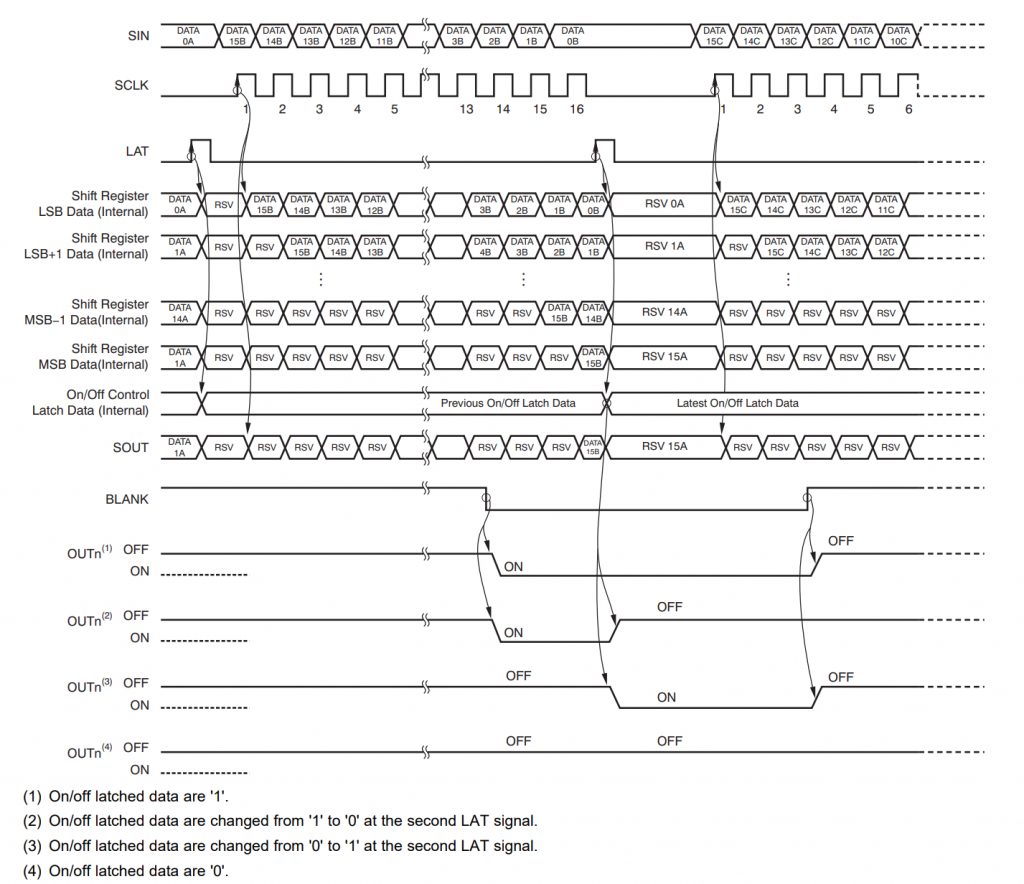
The best specifications I could find on the chip used in the LED matrix (including timing requirements, waveforms, etc) is a data sheet for a TI chip called the TLC59281 and a datasheet for an ON chip called the CAT4016. The chip that is built into my board is called “JX15020GP”, however, I’m pretty sure that this chip is very similar or a clone of the two chips mentioned above. Therefore the datasheets for these chips should give us a general idea of the timing requirements for the LED matrix.
I used the timing diagrams found in the data sheets to help determine states and the number of cycles spent in each state for the state machine in the control path.
Control Path
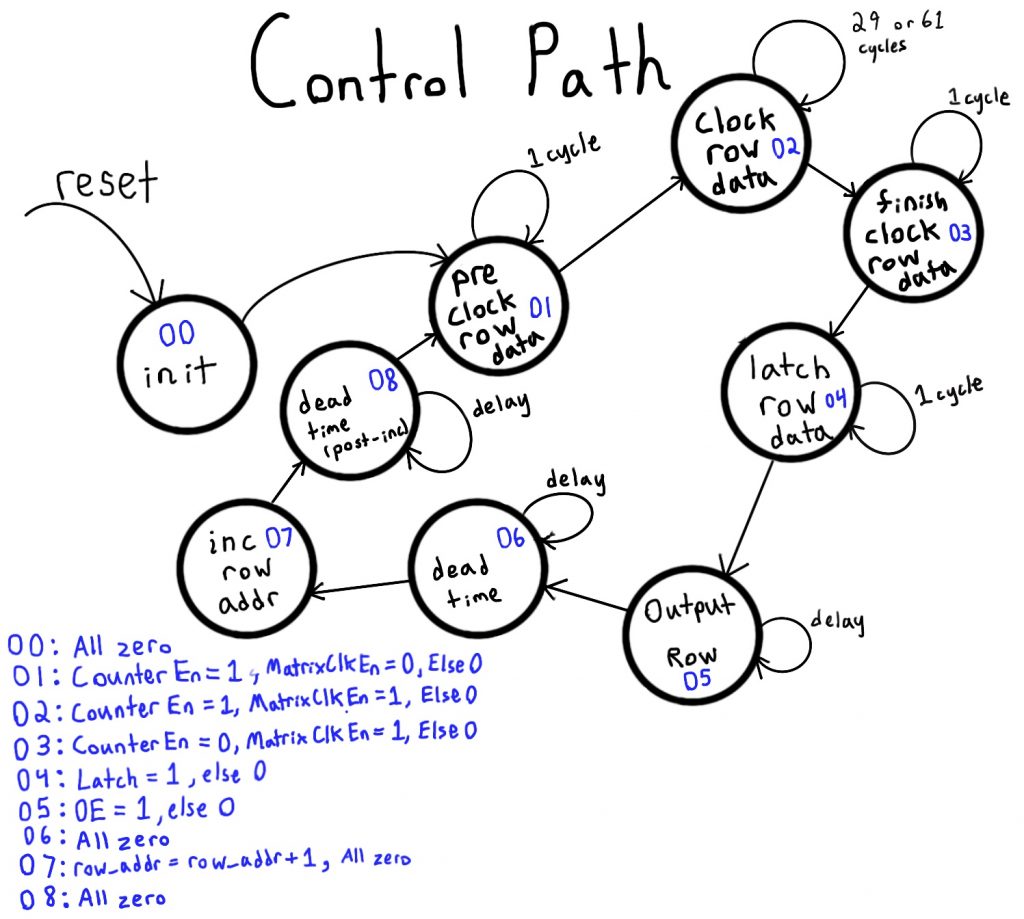
The control path consists of 9 states. The init state is the state entered after a reset. The three states: pre-clock-row-data, clock-row-data, and finish-clock-row-data, are used to clock data into the LED matrix’s shift registers. These three states also compensate for the pipelining within the on-chip RAM (see data-path). After data has been clocked out, the latch-row-data state outputs a latch signal to latch the data to the LED matrix’s output register. Then, the output row state enables the output from the output registers to the LEDs. Finally, the inc-row-addr state increments the row address to allow the process to start again on the next set of rows. In between the output and increment states and the increment and pre-clock, are states that disable the LEDs. These “dead” states are used to allow the capacitances built up in the system to dissipate thereby reducing issues with ghosting.
Data Path Verilog
module led_matrix_data_path(
input CLK,
input RESET,
input CE,
input WE,
input [4:0] row0,
input [3:0] col0,
input [2:0] color0,
input [4:0] row1,
input [3:0] col1,
input [2:0] color1,
output [2:0] RGB0,
output [2:0] RGB1
);
reg [7:0] addr;
always @(posedge CLK, posedge RESET) begin
if(RESET) begin
addr <= 0;
end
else if(CE) begin
addr <= addr + 8'b1;
end
else begin
addr <= addr;
end
end
two_port_ram color_matrix(
.reset(RESET),
.address_a((WE) ? {row0,col0} : {1'b0, addr}),
.address_b((WE) ? {row1,col1} : {1'b1, addr}),
.clock(CLK),
.data_a(color0),
.data_b(color1),
.wren_a(WE),
.wren_b(WE),
.q_a(RGB0),
.q_b(RGB1)
);
endmoduleThis Verilog code implements the data-path seen above. It consists of a RAM whose addresses are provided by a register that increments when CE (count-enable) is high. Additionally, the RAM can be written to on both of its ports when it isn’t being read from. These times when the RAM can be written are determined by the control path. The row, col, and color inputs allow 2 pixels to be changes per clock cycle.
Model RAM Verilog (to be replaced with on-chip RAM)
module two_port_ram(
input reset,
input [8:0] address_a,
input [8:0] address_b,
input clock,
input [2:0] data_a,
input [2:0] data_b,
input wren_a,
input wren_b,
output [2:0] q_a,
output [2:0] q_b
);
reg [8:0] address_a_pipe;
reg [8:0] address_b_pipe;
reg [2:0] data_a_pipe;
reg [2:0] data_b_pipe;
reg wren_a_pipe;
reg wren_b_pipe;
reg [2:0] mem [511:0];
reg [2:0] q_a_pipe;
reg [2:0] q_b_pipe;
integer i;
always @(negedge clock) begin
if(reset) begin
address_a_pipe <= 0;
address_b_pipe <= 0;
data_a_pipe <= 0;
data_b_pipe <= 0;
wren_a_pipe <= 0;
wren_b_pipe <= 0;
q_a_pipe <= 0;
q_b_pipe <= 0;
for(i = 0; i < 512; i = i + 1) begin
mem[i] <= 3'b000;
end
mem[0] <= 3'b000;
mem[1] <= 3'b001;
mem[2] <= 3'b010;
mem[3] <= 3'b011;
mem[4] <= 3'b100;
mem[5] <= 3'b101;
mem[6] <= 3'b110;
mem[7] <= 3'b111;
end
else begin
address_a_pipe <= address_a;
address_b_pipe <= address_b;
data_a_pipe <= data_a;
data_b_pipe <= data_b;
wren_a_pipe <= wren_a;
wren_b_pipe <= wren_b;
q_a_pipe <= mem[address_a_pipe];
q_b_pipe <= mem[address_b_pipe];
end
end
assign q_a = q_a_pipe;
assign q_b = q_b_pipe;
endmodule
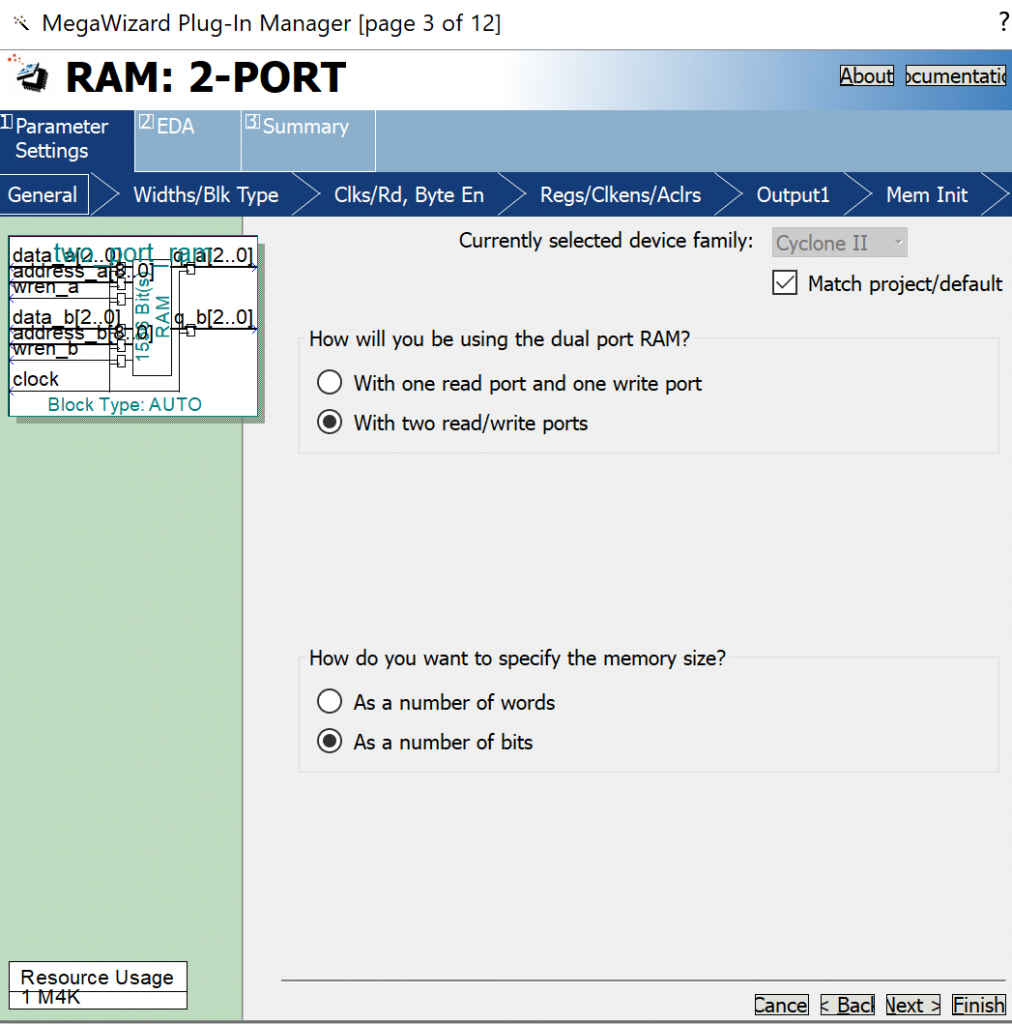
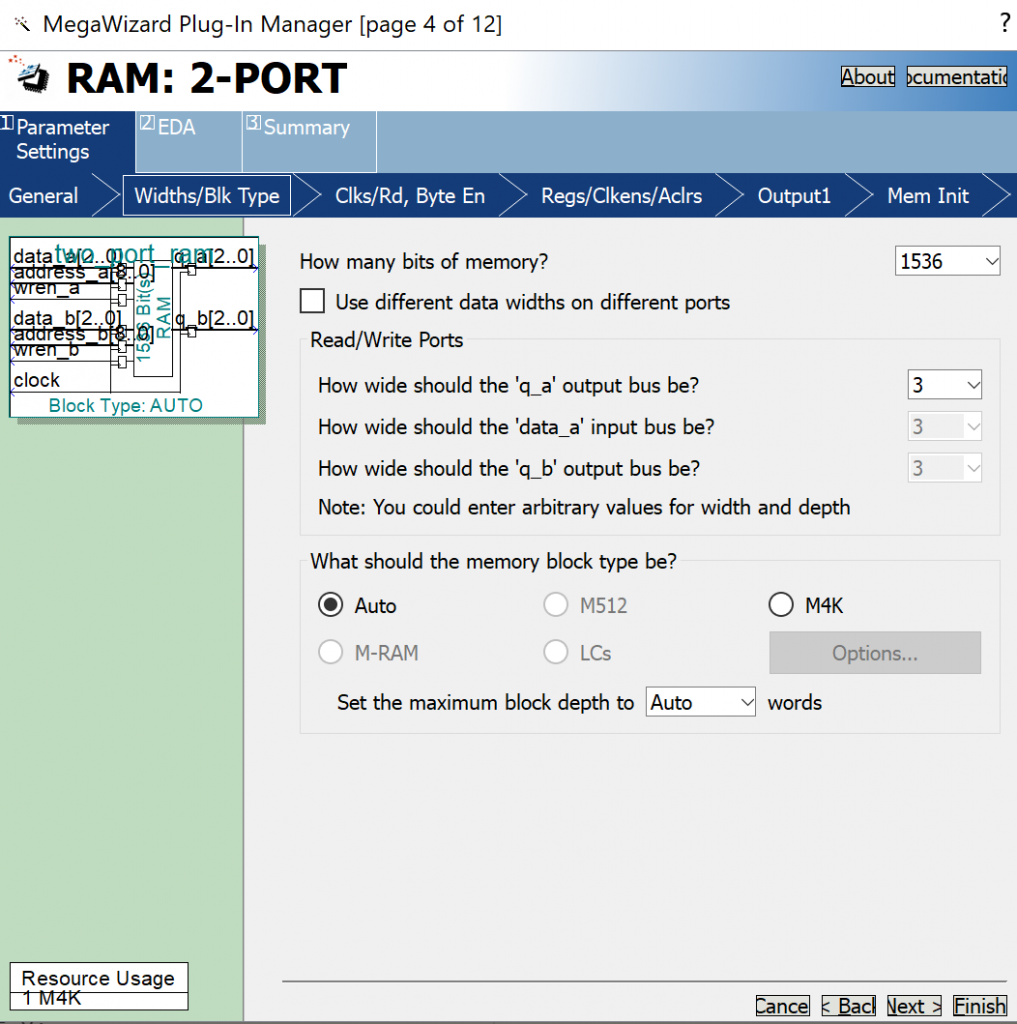
This is a Verilog model of a two-port RAM. Depending on the FPGA you are using you can leave this as is or replace it with an on-chip RAM. I am going to use an Altera Cyclone II FPGA to drive this LED Matrix. The editor for this FPGA: Quartus II 13.0sp, can allow you to use on-chip 2 port RAM via its “MegaWizard Plug-In Manager”. By using the Memory Compiler option and selecting a two-port RAM that has a bit width of 3 bits and a size of 1,536 bits an on-chip RAM that is functionally equivalent to the model can be used.
Control Path Verilog
module led_matrix_ctrl_path(
input CLK,
input RESET,
output reg CE,
output reg CLK_EN,
output reg LAT,
output reg OE,
output reg busy,
output reg [2:0] row_addr
);
parameter INIT = 4'd0, PRE = 4'd1, DATA = 4'd2, POST = 4'd3,
LATCH = 4'd4, OUTPUT = 4'd5, DEAD = 4'd6, INC = 4'd7, DEADinc = 4'd8;
reg [31:0] cycle_count;
reg [3:0] state;
reg [3:0] next_state;
//Next State Logic
always @ (*) begin
case(state)
INIT: next_state = PRE;
PRE: next_state = (cycle_count == 1) ? DATA : PRE;
DATA: next_state = (cycle_count == 29) ? POST : DATA;
POST: next_state = (cycle_count == 1) ? LATCH : POST;
LATCH: next_state = OUTPUT;
OUTPUT: next_state = (cycle_count == 15000) ? DEAD : OUTPUT;
DEAD: next_state = (cycle_count == 250) ? INC : DEAD;
INC: next_state = DEADinc;
DEADinc:next_state = (cycle_count == 250) ? PRE : DEADinc;
default: next_state = INIT;
endcase
end
//Output Logic
always @ (state) begin
case(state)
INIT: begin CE = 1'b0; CLK_EN = 1'b0; LAT = 1'b0; OE = 1'b1; busy = 0; end
PRE: begin CE = 1'b1; CLK_EN = 1'b0; LAT = 1'b0; OE = 1'b1; busy = 1; end
DATA: begin CE = 1'b1; CLK_EN = 1'b1; LAT = 1'b0; OE = 1'b1; busy = 1; end
POST: begin CE = 1'b0; CLK_EN = 1'b1; LAT = 1'b0; OE = 1'b1; busy = 1; end
LATCH: begin CE = 1'b0; CLK_EN = 1'b0; LAT = 1'b1; OE = 1'b1; busy = 0; end
OUTPUT: begin CE = 1'b0; CLK_EN = 1'b0; LAT = 1'b0; OE = 1'b0; busy = 0; end
DEAD: begin CE = 1'b0; CLK_EN = 1'b0; LAT = 1'b0; OE = 1'b1; busy = 0; end
INC: begin CE = 1'b0; CLK_EN = 1'b0; LAT = 1'b0; OE = 1'b1; busy = 0; end
DEADinc:begin CE = 1'b0; CLK_EN = 1'b0; LAT = 1'b0; OE = 1'b1; busy = 0; end
default:begin CE = 1'b0; CLK_EN = 1'b0; LAT = 1'b0; OE = 1'b1; busy = 0; end
endcase
end
//State Transition Logic
always @ (posedge CLK, posedge RESET) begin
if(RESET) begin
state <= INIT;
cycle_count <= 0;
end
else if(next_state != state) begin
state <= next_state;
cycle_count <= 0;
end
else begin
state <= next_state;
cycle_count <= cycle_count + 1;
end
end
//Row Address Logic
always @ (posedge CLK, posedge RESET) begin
if(RESET) begin
row_addr <= 0;
end
else if(state == INC) begin
row_addr <= row_addr + 1;
end
else begin
row_addr <= row_addr;
end
end
endmodule
The control path is implemented as a Verilog state machine that is broken into switch statements that implement the next state logic, output logic, and transition logic.
Each state in the control path FSM has a corresponding parameter in the Verilog and the “cycle_count ==” in each case of the next state logic determines how many cycles are spent in each state. The cycle_counts for the PRE, DATA, and POST states are determined by the data-path pipeline and the amount of data to be clocked out. The cycle_counts for the OUTPUT and DEAD states were determined by trial and error (the delays that resulted in most brightness, greatest frame-rate, and least ghosting) these values may vary from matrix to matrix based on the matrix’s chip’s timing requirements.
Top Level (plugs into LED Matrix)
module top_level(
input CLK,
input reset,
output clk_out,
output [2:0] RGB0,
output [2:0] RGB1,
output LAT,
output OE,
output [2:0] led_addr,
output [3:0] gnd
);
wire CE;
wire CLK_EN;
wire WE;
wire RESET;
reg CLK_SLO;
assign RESET = ~reset;
assign clk_out = CLK_EN & CLK_SLO;
assign gnd = 4'b0000;
//Clock Divider (50 MHz -> 25Mhz)
always @(posedge CLK, posedge RESET) begin
if(RESET) begin
CLK_SLO <= 0;
end
else begin
CLK_SLO <= ~CLK_SLO;
end
end
led_matrix_data_path data_path(
.CLK(CLK_SLO),
.RESET(RESET),
.CE(CE),
.WE(1'b0),
.row0(5'b00000),
.col0(4'b0000),
.color0(3'b000),
.row1(5'b00000),
.col1(4'b0000),
.color1(3'b000),
.RGB0(RGB0),
.RGB1(RGB1)
);
led_matrix_ctrl_path ctrl_path(
.CLK(CLK_SLO),
.RESET(RESET),
.CE(CE),
.CLK_EN(CLK_EN),
.LAT(LAT),
.OE(OE),
.busy(busy),
.row_addr(led_addr)
);
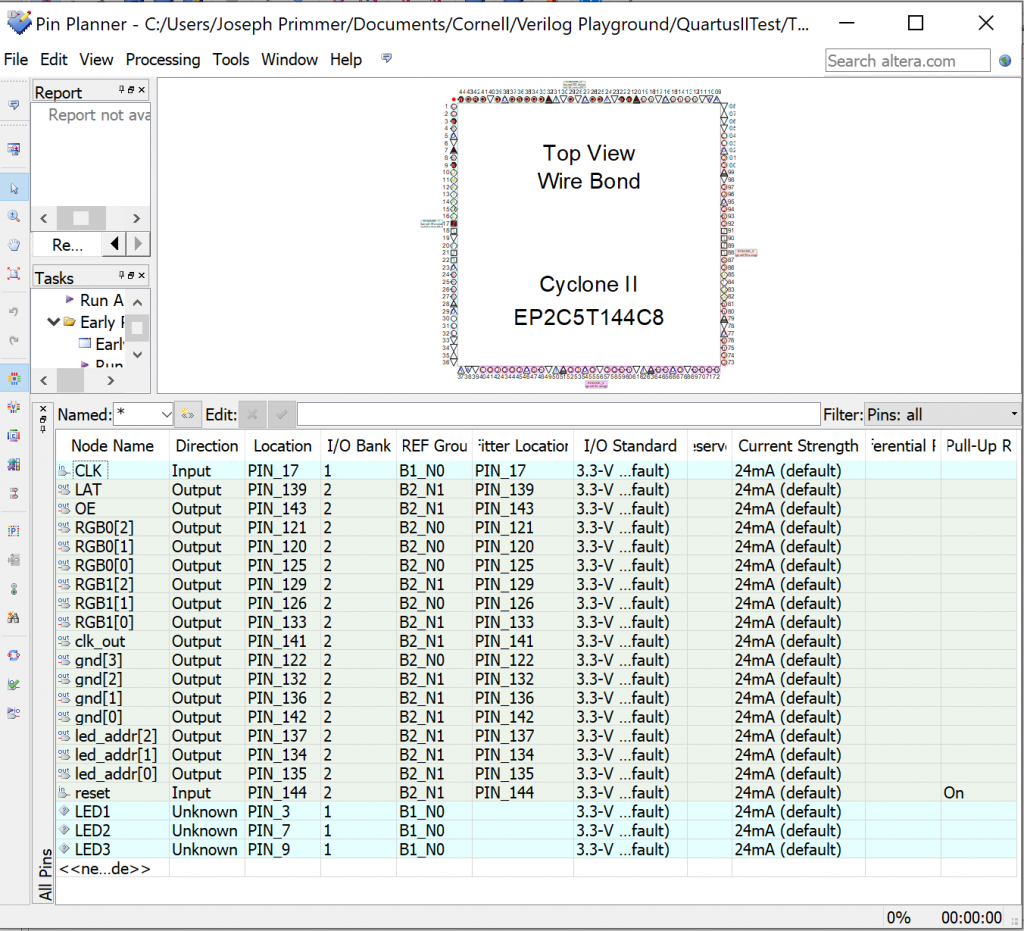
endmoduleThe top-level is mapped to output pins on your FPGA using your FPGA software’s pin planner. The corresponding pins on the FPGA can then be wired to the pin-out of the LED Matrix.
According to both chips discussed above, the TI chip max clock rate was 35MHz and the ON chip was 25MHz. Therefore, in order to meet the timing requirements, a clock divider is used to bring the clock rate down from 50MHz to 25MHz. For now, we will tie the writing functionality of the RAM to all zeros.
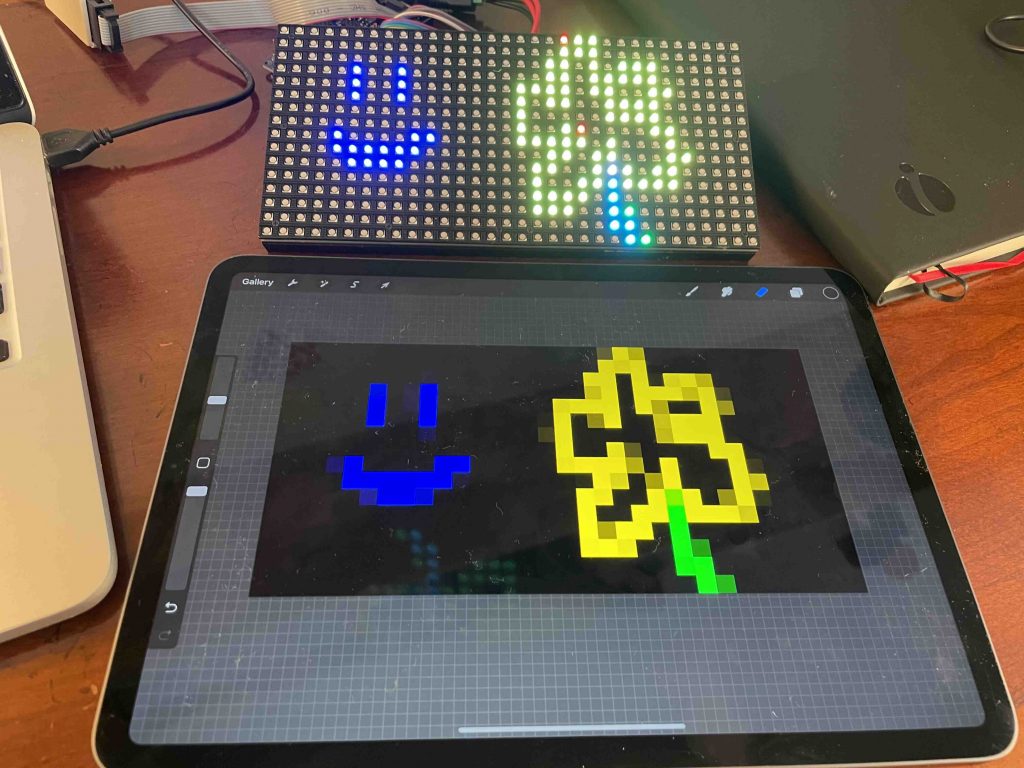
The RAM of the FPGA can be initialized using a memory file (mif). By setting the color values of the pixels of the LED matrix in this file, pictures can then be drawn.
In the next post, I will explore using the writing functionality of the RAM to animate interesting patterns on the LED matrix.